中国第一家交货的自动驾驶独角兽:完全自主泊车,千元级硬件成本
这不是头一个自主泊车方案。
但这是第一个无人驾驶技术、hold 住最难场景,真正可量产成本的方案。
意义还不止于此。在特斯拉路线备受质疑、全球自动驾驶初创公司八卦多于业务进展,无人车“寒冬”的种种不利的风潮下,此时交货,非比寻常。
今日正名者:Momenta。
这家中国自动驾驶独角兽公司,刚刚发布了自主泊车产品 Mpilot Parking。
这是一款怎样的产品,不多说,先看货。
产品初体验
自主泊车,顾名思义就是泊车进库全程让车“自主”。
在 Momenta 苏州总部地下约 500 平米的多层写字楼停车库,我们随这辆自动驾驶改装痕迹并不明显的林肯 MKZ,体验了全过程:
到达停车场,司机下车,自主泊车启动:
开始从地面进入地下,下坡,光线变暗。
地库行车中,速度5公里/小时左右,但人车混行场景很常见:
也有其他人类司机正在泊车,无人车选择停下等待,先让其完成:
最后,到达目标停车位,倒车入库。如果是非写字楼场景,也可以指定或让无人车“自主”寻找空闲车位泊入:
接下来切换使用场景——无人车受到车主远程召唤,泊出:
再次遇到其他车辆,但这次无人车检测判定可以绕行,于是绕行通过——相似场景,不同处理方式,也体现出系统老司机的那一面。
最后到达电梯口,车主上车,自动驾驶系统继续帮助开出地库。
全程零接管,车主远程通过手机就能一键启动和召唤。
可以预想的是,一旦方案进入前装并以量产车交付,停车入库的时间将得到节省,不少停车场的剐蹭事故也能极大避免。
而且令人振奋的还有时间表,Momenta 方面透露,跟多个标杆客户的实际合作已经展开,2021 年-2022 年该产品方案就会陆续通过量产车交付。
自动驾驶产品检验标准
虽然不是头一家推出自主泊车产品,但 Momenta 该款产品,确实不一样。
有啥不一样?体现在车主体验层面的大不一样。
区别于之前的自主泊车方案——不限场景、不堆昂贵传感器,甚至不依赖停车场智能化改造。
产品可以经得起三大标准的检验:可用、好用,容易用。
先从可用说起,核心检验项是成本。
一套自主泊车方案,从车库入口到车位停稳熄火,如今技术上并非不能实现,然而一旦需要加持激光雷达等激光雷达的传感器,量产门槛就会被大大推高。
而且当我们说“可用”,还得是人人买得起的可用,任何车型可配的可用,无需经年累月等待车规标准的可用。
Momenta 的方案,实际就是以此倒推打造的成果。
整套传感器系统,共搭载4路环视鱼眼相机、一个前视摄像头,外加 12 个超声波雷达,均是已成熟量产符合车规的传感器。
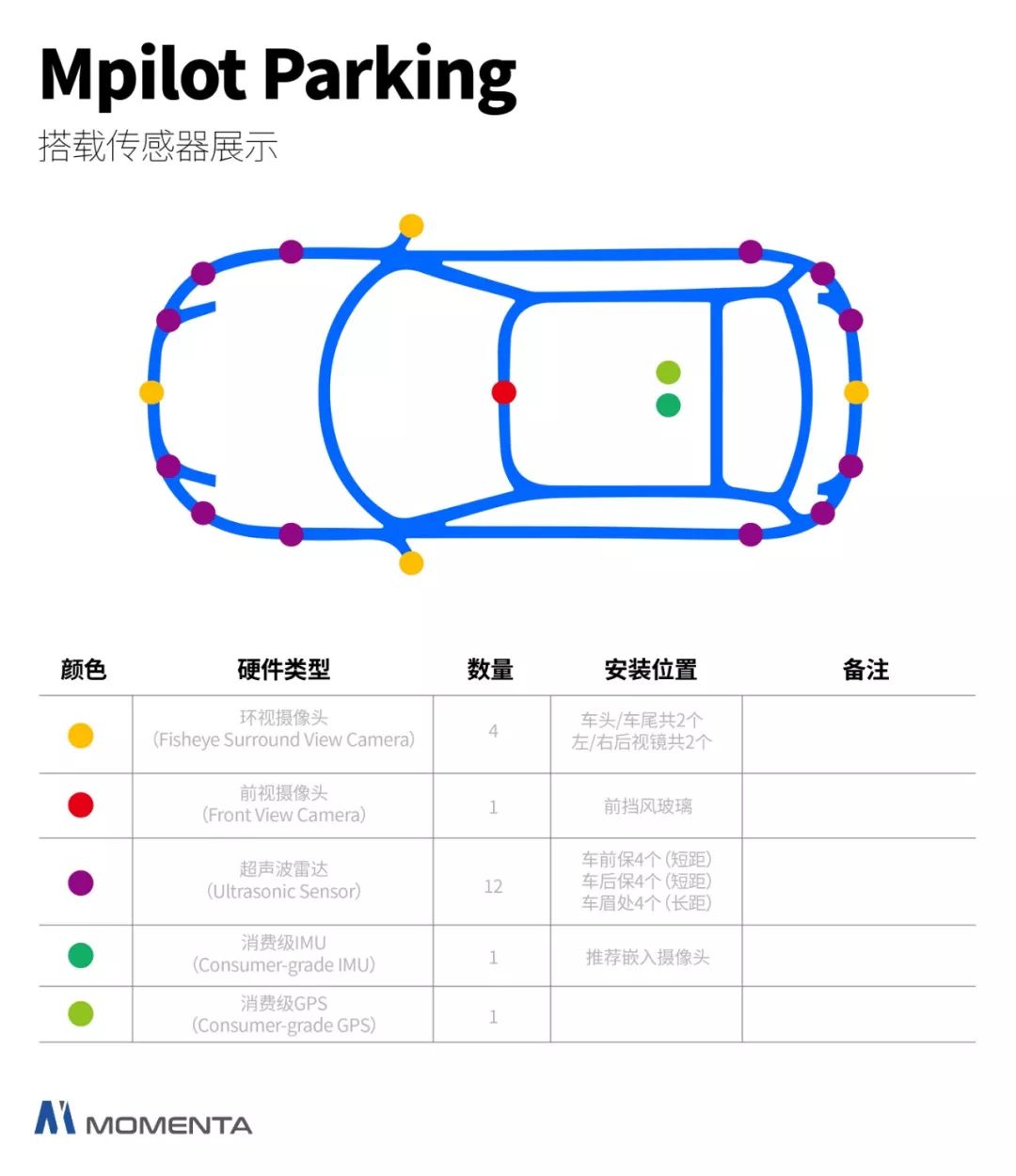
虽然没有明确公布成本数据,但略微对汽车产业供应链熟悉的话,也就约为一部手机的售价——还是国产手机。
如果传感器成本才多一部手机的钱,就能让每天车库出入交给机器,算不算可用?
其次是好用,核心考验的是场景应对能力。
换而言之,任何时候任何场景都不需要车主来接管的能力。
区别于环路无人驾驶,地库车速相对较低,但依然不乏极端场景。
比如人和其他车辆不规范操作的场景,车辆占道或超出正常车位的场景,多层车库上下坡造成环境变化的场景。
都会影响自动驾驶正常行进,也就要求自主泊车方案能够准确感知障碍物的种类、尺寸、距离以及运动状态,也需要有更完善准确的定位能力。

最后是容易用。核心要求是买来即用,不挑场地。
之前已经发布的自主泊车方案,或者对车端智能传感设备配置要求高,或者对停车场智能化改造有依赖。
最常见的是用传感器改装停车场,通过车路协同的方式降低车端智能的难度,但无论是成本,还是改装时间,都带来新问题。
这都会阻碍自主泊车的真正落地使用。
从车厂和车主角度而言,谁又希望卖车和新方案时,还要让用户考虑是否所有停车场都能去的问题?
所以场端依赖一日不解决,自主泊车方案都不能算易用。
而且既然是容易上手,就得“开箱即用”,不能再让用户参与长时间的“路测”。
所以此次 Momenta 也将其另一项核心壁垒能力——高精度地图的建图定位技术,落地到了产品方案上。
背后技术详解
如此水准的自主泊车方案实现,所用技术肯定不止一项。
现已业内耳熟能详的感知、决策规划、控制和定位,均在其中发挥作用。
但此次 Momenta 之所以方案可用好用易用,最具功力的自然是高精度地图建图方面的突破。
熟悉 Momenta 创业史的人,都对 Momenta 的高精度地图方案不陌生。
但现在,“重活苦活”正在转换为优势。
一方面是 Momenta 业已成熟的低成本自动化建图。
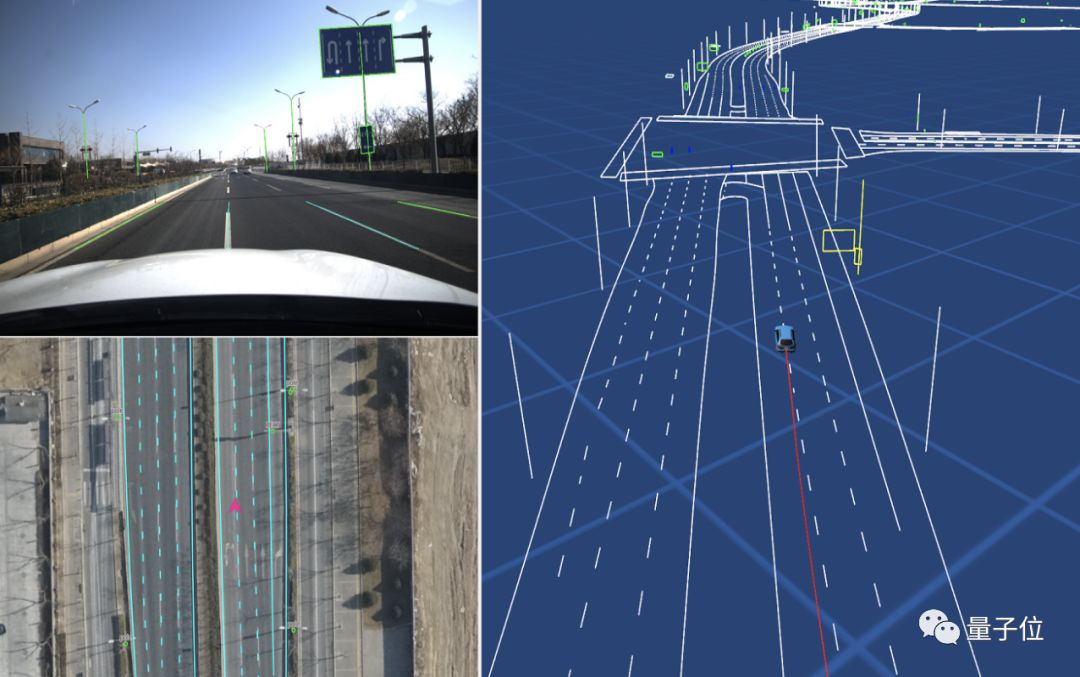
相比昂贵的激光雷达建图,Momenta 采用视觉为主的方案实现低成本自动化建图。
建图采集系统使用成熟的四路环视鱼眼相机、消费级 IMU 及轮速等传感器,总成本较低。
在建图过程中,通过深度学习方法提取视觉语义特征,使用 SLAM 技术自动化生成基于语义的高精地图。
整个系统云端和车端都能完成实现,无需人员参与,精度达到 10cm 级别。这是什么概念?一般车道线是 20cm。

另一方面是建图的低门槛:量产车行驶过停车场就能完成。
当搭载了 Mpilot Parking 的车辆进入地图未覆盖区域,车辆行驶过停车场即可自我学习、建立该区域地图,并上传到云端,便于后续基于此地图上进行定位。同时,行驶在此区域的其他车也可共享受惠。
这种众包方式,也是快速规模化实现低成本建图和更新的关键所在。
无需专门的地图采集车,支持量产车辆自主建图,多辆车通过众包实现快速规模化建图和更新。
而且随着时间的推移,地库中增加或消失的元素,都可以通过众包车辆进行地图元素的实时更新。
不得不说,确实是应对“无限战争”的一次人民汪洋大海式的解决之道。
Momenta之路
值得一提的是该方案背后的核心负责人:夏炎。

她是 Momenta 的合伙人,也是产品研发负责人。
虽然在工业界亮相不多,但夏炎在学术领域早已名声大噪。
而且 Mpilot Parking 还不是 Momenta 团队的唯一产品。
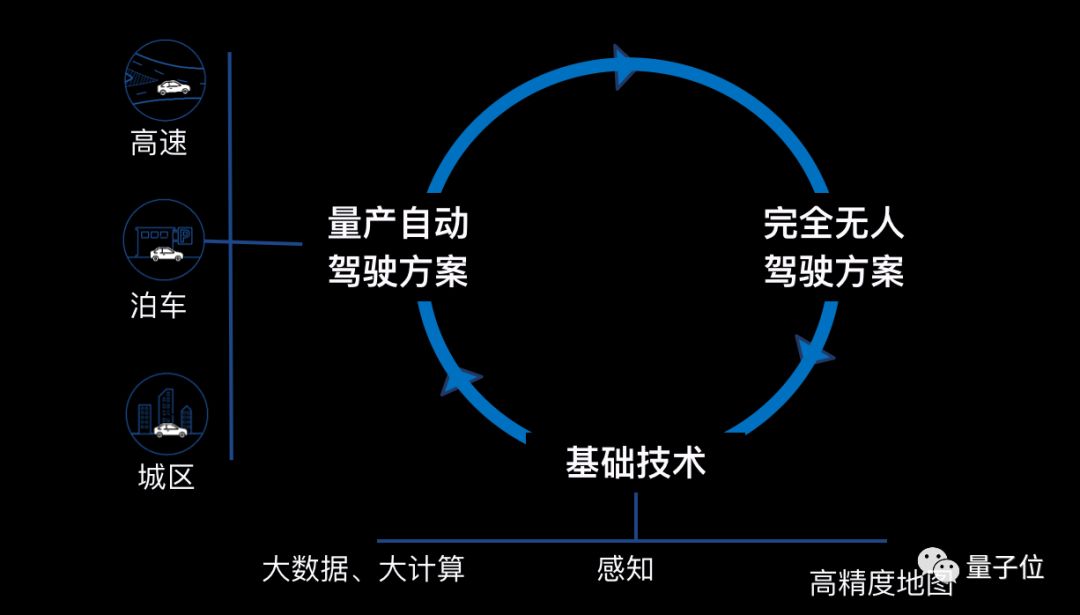
之前他们还打造完成了面向 Highway (高速)的自动驾驶方案,明年第一季度还将发布 Mpilot Urban(城市)场景方案。
难能可贵的是,从高速、泊车到城市区间路况,Momenta 都将基于同一套硬件系统平台和传感方案。
这也意味着,成本方面无需变化,就能为车厂和车主用户提供三种场景下的自动驾驶能力,实现最大化连续自动驾驶体验。
但这还不是这家自动驾驶独角兽的完整路线宏图。
夏炎说,Momenta 从创办起就明确了目标,希望通过数据迭代,实现人机共驾到完全无人驾驶。
而从有人到无人,其中关键就是数据真正的大规模、自动化流通,形成闭环。
这就对技术、成本、安全和产品的一体化提出了高要求。
在本次方案落地中,夏炎也专门谈到了对场端智能、5G 等技术的看法。
她认为这些技术都会对未来自动驾驶产生巨大影响,但当前它们将来未来,可以作为冗余准备,但终归还要是从车端完成核心问题。
于是以规模化量产交付为目标,也从规模化量产为目标。
夏炎带领团队从 2017 年年底开始打造方案,夜以继日,不断推动产品迭代。
现在,Highway (高速)和泊车场景都以完成,先期前装客户合作已经展开。
这套方案除了硬件传感平台一以贯之,也不限车型车款,可以最大化推动规模化量产。
这倒让人想起特斯拉 CEO 马斯克的最新思考,他说一旦特斯拉全自动驾驶实现,RoboTaxi 推出,就会提高车的售价,甚至不再销售汽车。
或许从一开始,马斯克就是出于自动驾驶造车的。
不过在地球另一端,Momenta 这群年轻 AIer,从一开始就从自动驾驶而去,以自动驾驶大脑为目标,可以把系统放到任何车上,让每一个人都可以先体验到自动驾驶功能。
先解放部分时间,提升驾驶体验,最后在数据迭代流通中实现人从驾驶中的完全解放。
更重要的是,自动驾驶遭遇质疑的当前,Momenta
站了出来,用产品说话,给外界以信心。
他们因为相信自动驾驶而出发。
但现在,他们会让更多人因为看见而相信。



扫描二维码进入蓝湖官方微信