停车浪费时间,Momenta如何打造安全可量产的自主泊车?
Momenta 作为无人驾驶的新生代明星公司,定位于做自动驾驶的软件算法,核心使命便是打造自动驾驶的大脑。
打造自动驾驶大脑可以分为不同场景,比如结构化道路的中高速场景、城区场景、低速泊车场景。在今年的 GIV 2018 全球智能汽车前沿峰会上,Momenta 联合创始人、研发总监夏炎就从自主泊车说起,探讨“打造安全可量产的自主泊车”。
本文来自雷锋网新智驾记者彭赛琼对其演讲内容的编辑整理:

自主泊车的价值
对用户来说,最理想的泊车方式是,车先停在最方便他上楼梯或者上电梯的地点,然后车自己停到车位上,用户用车时只需用手机端进行召回,车辆就会自动行驶到最方便用户上车地方,这样就可以节省用户大部分时间。
而自主泊车在三个场景中可以有比较多的应用:
第一,住宅和办公楼。
住宅小区和办公楼都有固定停位,每天上下班时间都会出现许多泊车的行为,自主泊车可以节省大量的精力。
第二,商场和酒店。
商场和酒店这类人员较多的场所,找停车位对于司机来说是一种比较苦恼的经历。
第三,共享出行。
在共享出行中,车应该如何自动地停到一个合适的场景,令其能有类似于现在出租车的体验,也是广受关注的。
自主泊车在以上三个场景中会有比较有效的应用。其主要价值,实际上是节省用户的宝贵时间。假设我们一次取还车需要耗费 15 分钟,一天进行两次操作,一天就可以节省半个小时,一年节省 150 个小时,相当于 18 天的工作日,对于在城市中生活的人来说,这是一段非常宝贵的时间,也是自主泊车产品应用本身的价值。
如何打造可量产的自主泊车

关于泊车,目前汽车中搭载的比较多的功能是 APA(Active Park Assist ,自动停车辅助)。现在,搭载以泊车为主的 APA 功能的大部分的车型,也会融合超声波传感器等到 AVP(Automated Valet Parking,代客泊车)中,在最后 5 米进行泊车辅助,给驾驶员提供泊车的引导辅助功能。
接下来,会有这样的一些泊车应用,从 AVP 到Parking Pilot,从固定的起点到固定的终点,人在车里,汽车自主地行驶到车位上。这是 Level 3 的应用,带来的产品价值是可以避免用户自行停车的麻烦。但是本质上来讲,Level 3 还是一个比较中间态的产品,不能节省司机的时间,没有巨大的用户价值。
自主泊车中,最终要做的是 Level 4,完全没有人的自主泊车场景,才能从根本上节省用户的时间。Level 4 才能提供一个产品应该提供最终的价值。
自主泊车落地实际上是需要运营的,而运营,需要从低场端依赖出发,向高场端依赖发展。以下这三个场景是有关系的。如果住宅和办公楼有固定的车位,可以有一个用户指定的起点和终点,进行点到点的行驶,对场端运营待依赖较小。
在商场和酒店,虽然车有自主识别车位的功能,但在车场外的时候也需要识别停车场里哪里有空闲车位或者是否有空闲车位。这就需要将场端车位占用信息传到车端,所以在商场和酒店的自主泊车运营是需要有一个的场端联动的。
共享出行对场端运营的需要就更强了。所以讨论自主泊车如何落地的时候,更关注当前的住宅和办公楼等有固定车位的场景,我们认为这是一个最小场景。
在这个场景中,从技术依赖来讲,自主泊车如果能够做到方案上不需要依赖场端,其成本和扩展性能都可以提高,我们主要关注基于视觉的技术,因为在停车场场景中,是没有 GPS 的。室内定位也有很多种方案,例如蓝牙、场端的摄像头以及其他的通信等。
选择基于视觉的技术一部分是成本的考量,另一部分主要还是为了确保定位精度。因为在室内场景中,对自主泊车的定位精度,我们评估,是要小于 10 厘米的,其他的方案很难达到这个精度。
最后,要打造可量产的自主泊车产品,传感器也必须是可量产的。现在摄像头、超声波雷达、毫米波雷达等都需要考察是否能够量产。目前,比较不确定的是激光雷达。很多厂商都表示在 2019 年到 2020 年的时候,激光雷达将会有量产产品。我们也非常期待激光雷达的量产能够推进整个自动驾驶的量产落地。
如何确保自主泊车安全可靠?
自动驾驶最核心的问题是解决安全性的问题,人类驾驶员平均驾驶 1 亿公里会出一次事故,如果自动驾驶想要在市面上得到应用,需要有比人类更好的表现,至少要达到 10 亿公里一次的事故率。从统计学上来讲,如何做里程为1亿公里的实验,1000 次实验可能才会有一个统计上比较有意义的结果,所以也是需要进行 1 千亿公里的验证。按照目前汽车能够行使的总里程和汽车的成本,这是不可能完成的。
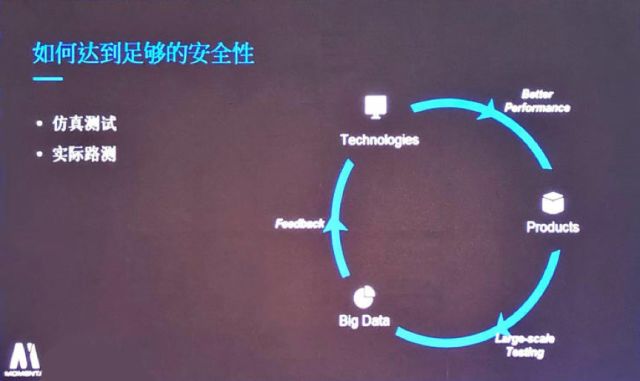
因此需要仿真测试实际的路测相结合。实际路测也是我们比较关注的一点,因为仿真环境到真实世界场景的概述仍是需要被解决的一个问题。实际路测中我们会先去完善我们的技术,然后在真实的场景里面进行大量的测试,再把这些测试产生的数据收集回来进行数据分析,不断地提高我们技术里面的性能问题,通过这样的闭环测试达到实际路测的效果。
在地下停车的场景中,是没有 GPS 的,第一个要解决的问题就是定位,我们有视觉语音地图的技术,通过三角的组合计算进行视觉的定位。另外,也要进行障碍物的识别、车位识别、路径规划以及路径跟踪等。
虽然 Momenta 已经有了 Demo,但是自主泊车的落地,还需要和传统的激光雷达尝试和主机厂的合作,共同实现 L4 的安全性。Momenta 更多的是从软件企业的角度出发,去思考测试安全性的问题,而汽车行业还有很多关于公路安全的测试方法,Momenta 期待能与这些企业联合,一起量产安全的自主泊车产品。
——偶尔皮一下—— 这么优秀的企业,谁是第一个伯乐? 答案当然是——蓝湖资本——啦。 ٩(๑>◡<๑)۶



扫描二维码进入蓝湖官方微信